BOSM -6010 Magni tat-tħin tal-boring b'ras opposta
1. Użu tal-magna:
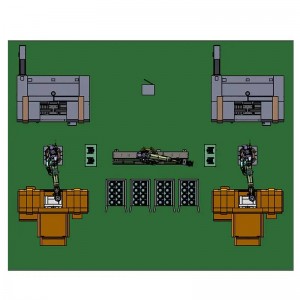
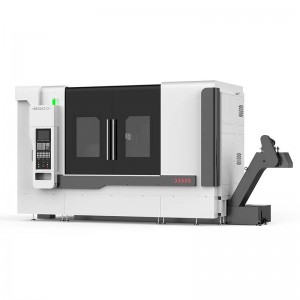
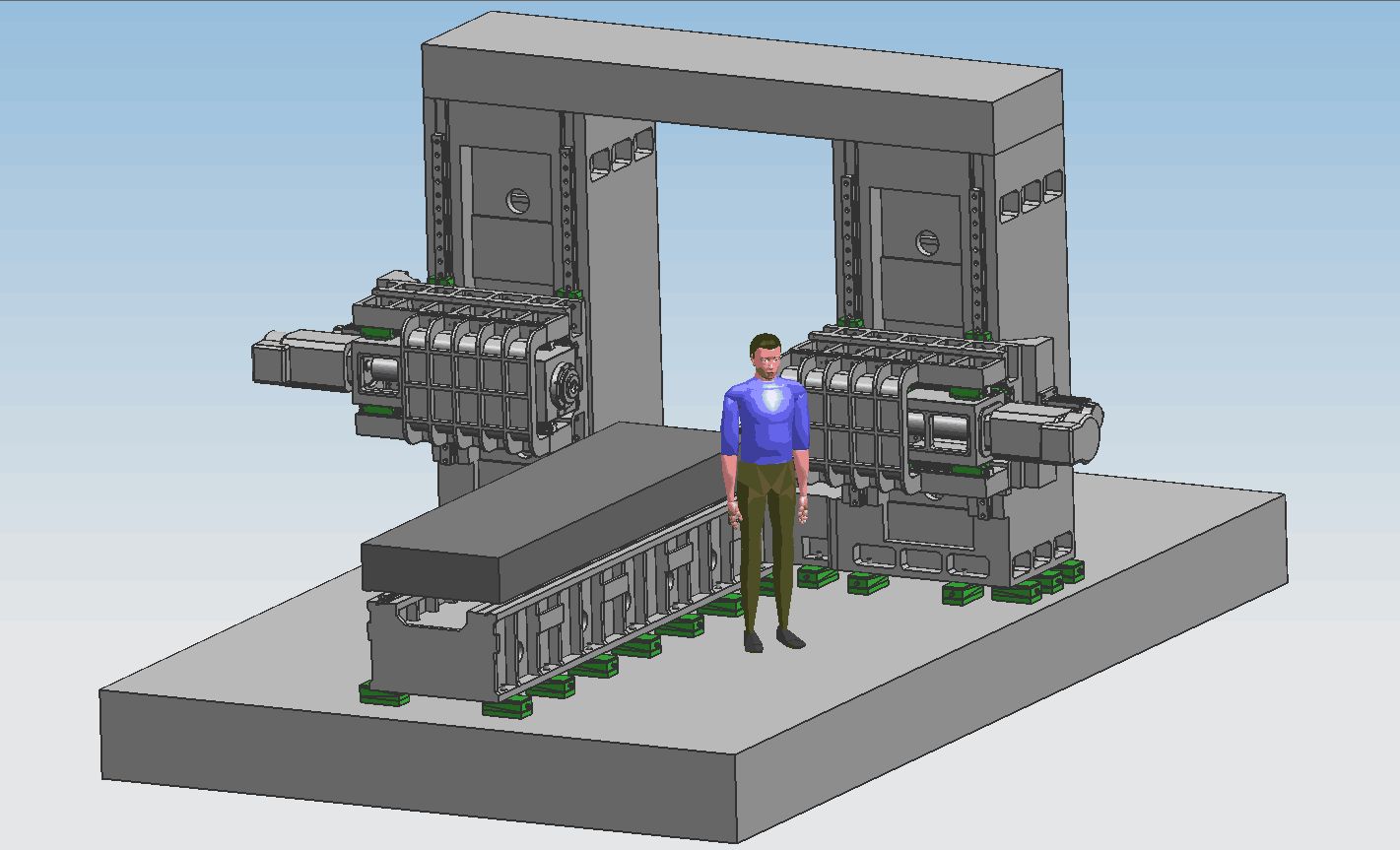
BOSM- 6000 * 1000 b'raġġ fiss CNC gantry b'kolonna doppja head-to-head boring u tħin magna hija għodda tal-magni speċjali għall-ipproċessar armi/bsaten excavator. Pillow, tista 'tirrealizza l-ipproċessar mgħaġġel tal-biċċa tax-xogħol, il-biċċa tax-xogħol tista' tiġi mtaqqba, mitħun, u mtaqqba fi ħdan il-firxa effettiva tal-puplesija, il-biċċa tax-xogħol tista 'tiġi pproċessata f'postha f'ħin wieħed (l-ebda ħtieġa għal ikklampjar sekondarju), il-veloċità tat-tagħbija u l-ħatt hija mgħaġġla, il-veloċità tal-pożizzjonament hija mgħaġġla, u l-eżattezza tal-ipproċessar hija għolja. Għoli, effiċjenza għolja fl-ipproċessar.
2.Magna strutturakaratteristiċi:
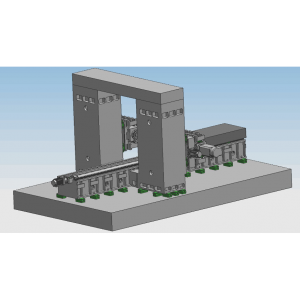
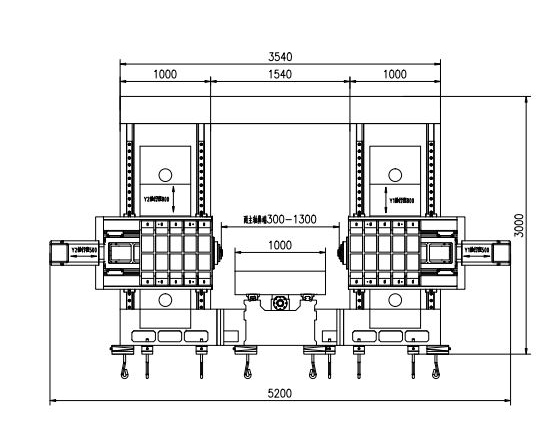
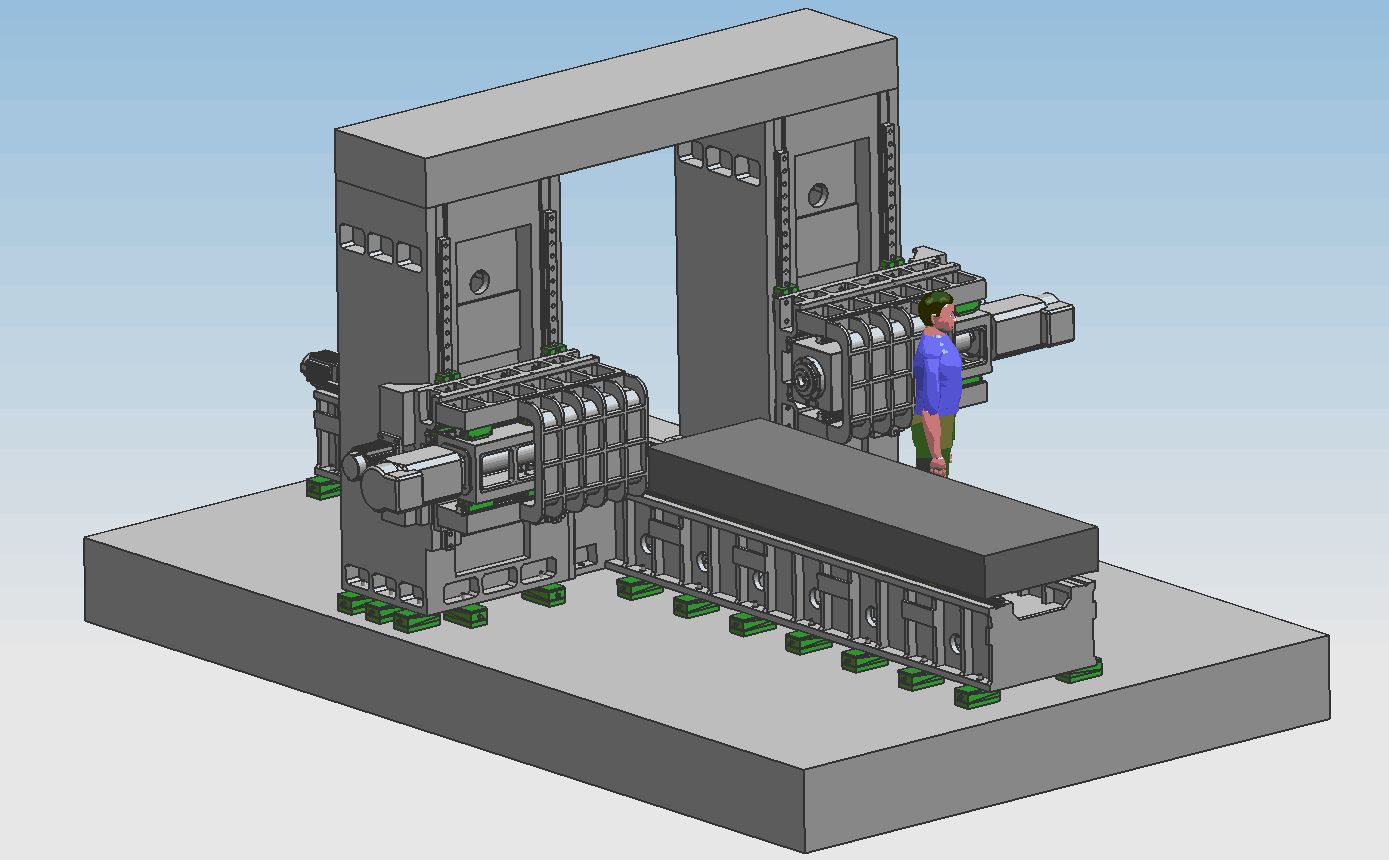
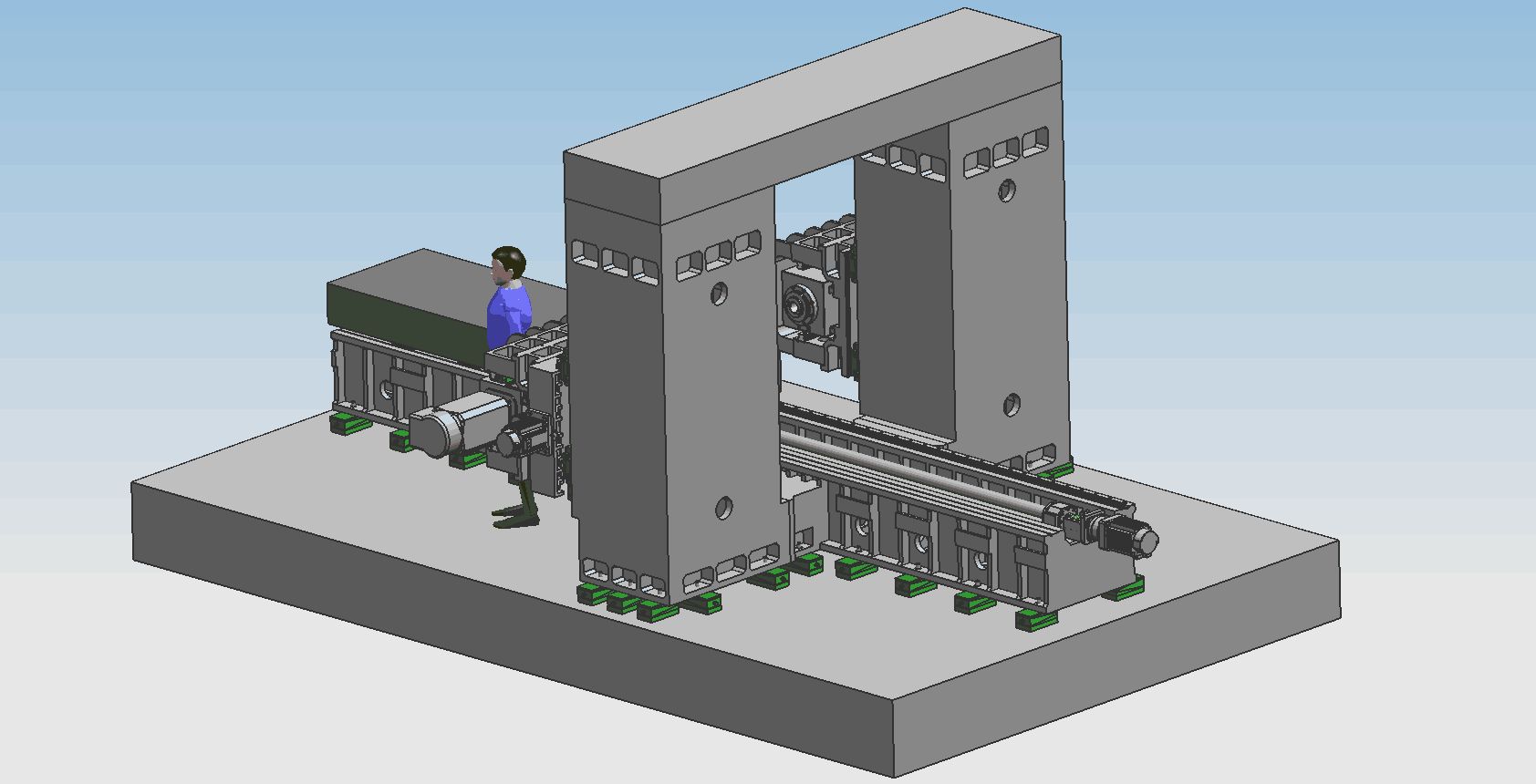
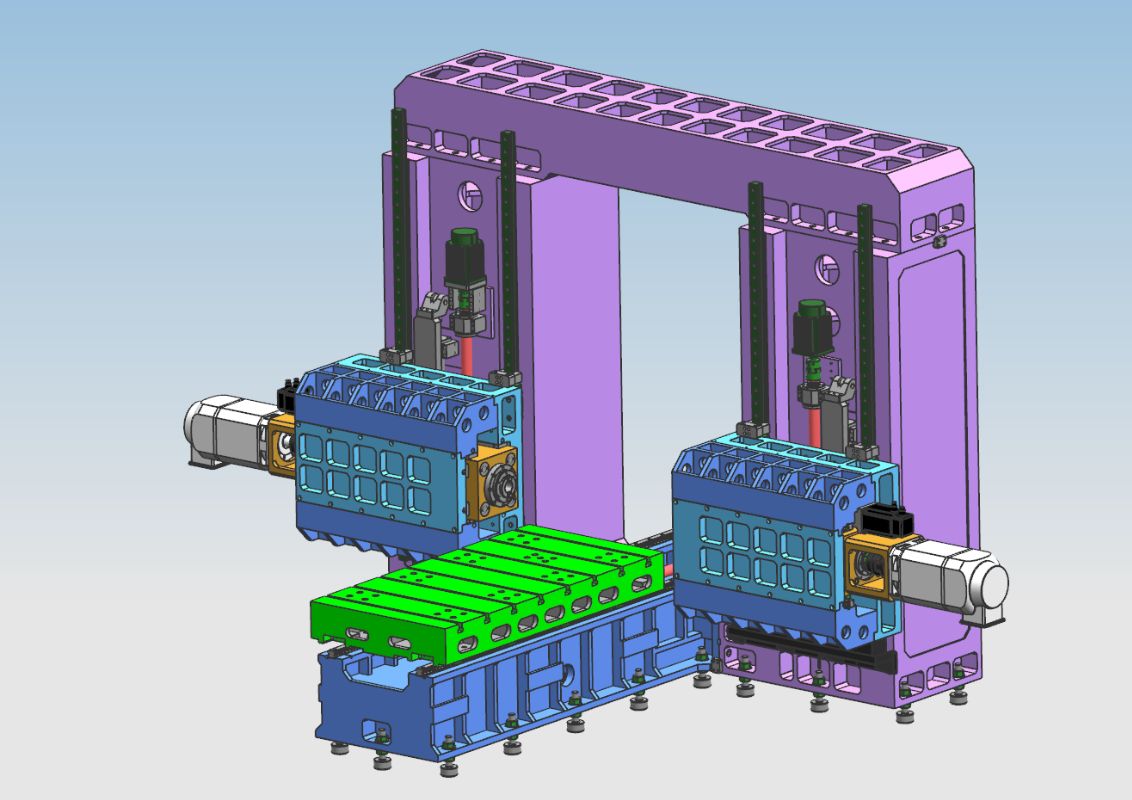
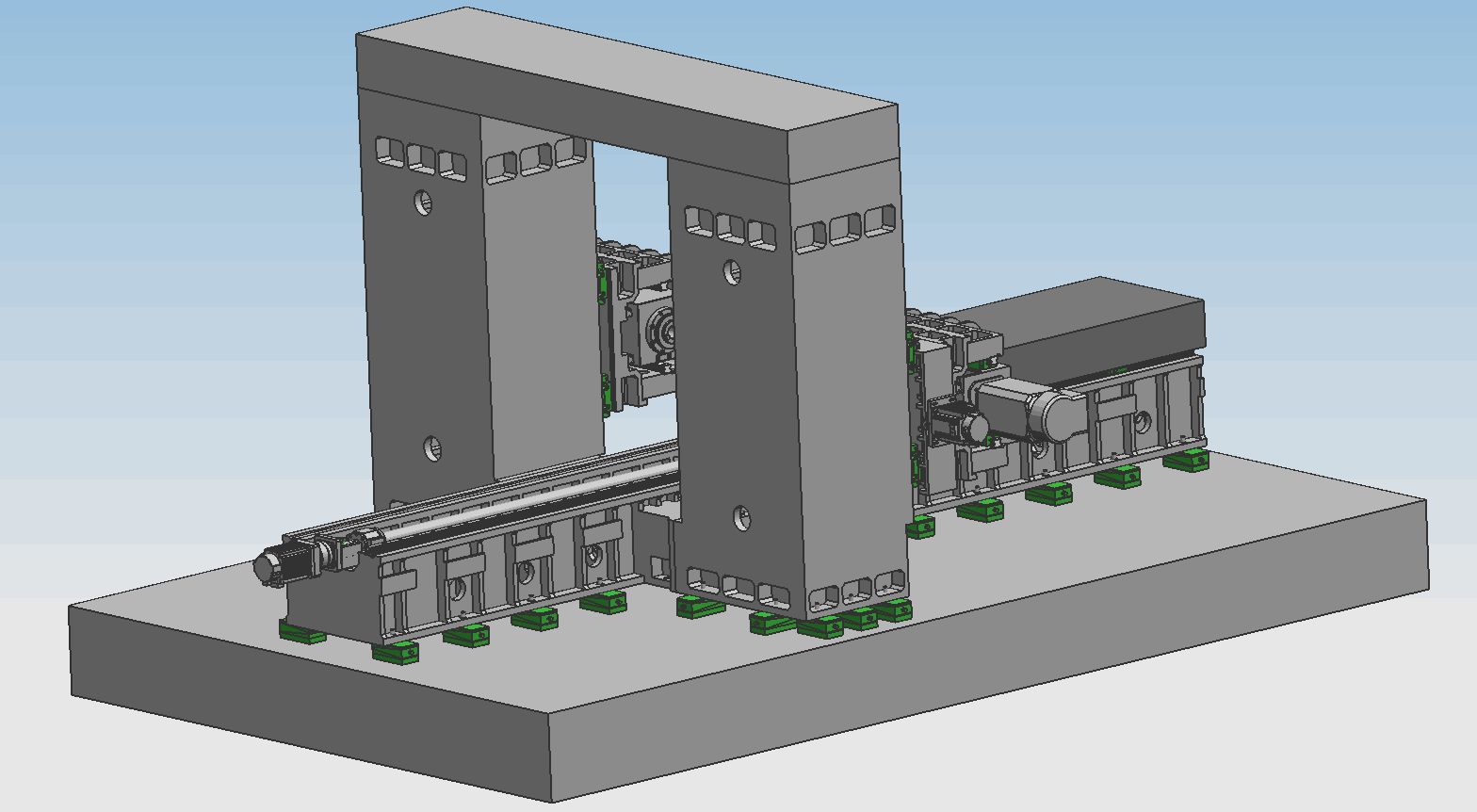
Il-komponenti ewlenin tal-għodda tal-magni: sodda, bank tax-xogħol, kolonni tax-xellug u tal-lemin, travi, travi li jgħaqqdu l-gantry, sruġ, imtaten, eċċ., Partijiet kbar huma magħmula minn molding tar-ramel tar-reżina, ħadid griż ta 'kwalità għolja 250 ikkastjar, ittemprat fi sħun fossa tar-ramel → tixjiħ tal-vibrazzjoni → trattament bis-sħana Ittemprar tal-forn→tixjiħ tal-vibrazzjoni→maċinazzjoni mhux maħduma→tixjiħ tal-vibrazzjoni→ittemprar tal-forn sħun→tixjiħ tal-vibrazzjoni→finitura, telimina kompletament l-istress negattiv tal-partijiet, u żżomm il-prestazzjoni tal-partijiet stabbli. Is-sodda fissa, il-kolonni tax-xellug u tal-lemin, il-gantry, u l-bank tax-xogħol jimxu; Għandu l-funzjonijiet ta 'tħin, boring, tħaffir, countersinking, tapping, eċċ. Il-metodu tat-tkessiħ tal-għodda huwa tkessiħ estern. L-għodda tal-magni fiha 5 assi tal-għalf, li jistgħu jirrealizzaw linkageand 5 assi b'azzjoni waħda. Hemm 2 irjus tal-qawwa. L-assi tal-għodda tal-magna u r-ras tal-qawwa huma murija fil-figura hawn taħt.X
2.1.L-istruttura ewlenija tal-parti tal-għalf tat-trasmissjoni axjali
2.1.1.Assi X:Il-mejda tax-xogħol tirreċiproka lateralment tul il-ferrovija tal-gwida tas-sodda fissa.
X 1- drajv tal-assi: mutur servo AC flimkien ma 'reducer planetarju ta' preċiżjoni għolja huwa mmexxi minn kamin tal-ballun biex imexxi l-moviment tal-bank tax-xogħol biex jirrealizza l-moviment lineari tal-assi X
Forma tal-ferrovija ta 'gwida: poġġi żewġ binarji ta' gwida lineari ta 'preċiżjoni ta' saħħa għolja.
2.1.2 Assi Z1:Ir-ras tal-qawwa u sarġ huma installati vertikalment fuq in-naħa ta 'quddiem tal-kolonna, u jirreċiprokaw 'il fuq u' l isfel tul il-ferrovija tal-gwida tal-kolonna.
Trażmissjoni tal-assi Z1: Il-mutur servo AC u r-rota sinkronika jintużaw biex issuq il-kamin tal-ballun biex issuq is-sarġ biex tirrealizza l-moviment lineari tal-assi Z
2.1.3 Assi Z2:Ir-ras tal-qawwa u sarġ huma installati vertikalment fuq in-naħa ta 'quddiem tal-kolonna, u jirreċiprokaw 'il fuq u' l isfel tul il-ferrovija tal-gwida tal-kolonna.
Trażmissjoni ta 'l-assi Z2: Il-mutur servo AC u r-rota sinkronika jintużaw biex issuq il-kamin tal-ballun biex issuq is-sarġ biex tirrealizza l-moviment lineari ta' l-assi Z.
2.1.4 Assi Y1:Is-sarġ tar-ras tal-qawwa huwa installat vertikalment fuq in-naħa ta 'quddiem tal-kolonna tal-lemin, u jirreċiproka xellug u lemin tul il-ferrovija tal-gwida tal-kolonna.
Trażmissjoni tal-assi Y1: mutur servo AC flimkien ma 'reducer planetarju ta' preċiżjoni għolja jintuża biex isuq il-muntun biex jimxi permezz tal-kamin tal-ballun biex jirrealizza l-moviment lineari tal-assi Y1
2.1.5 Assi Y2:Is-sarġ tar-ras tal-qawwa huwa installat vertikalment fuq in-naħa ta 'quddiem tal-kolonna tal-lemin, u jirreċiproka xellug u lemin tul il-ferrovija tal-gwida tal-kolonna.
Trażmissjoni tal-assi Y2: mutur servo AC flimkien ma 'reducer planetarju ta' preċiżjoni għolja jintuża biex isuq il-muntun biex jimxi permezz tal-kamin tal-ballun biex jirrealizza l-moviment lineari tal-assi Y2.
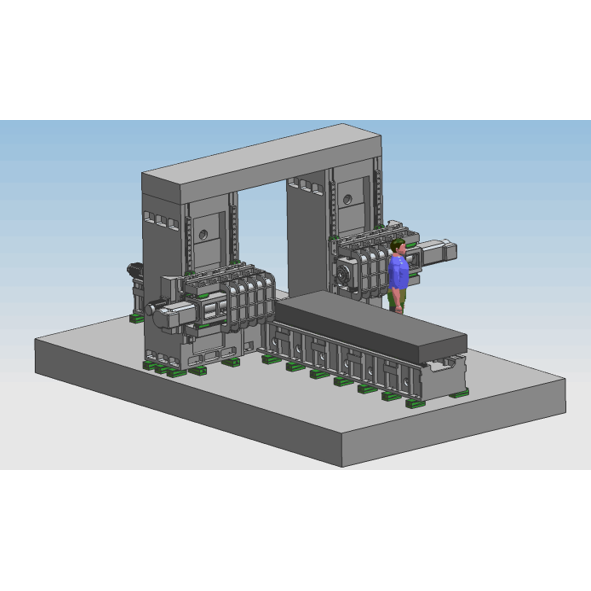
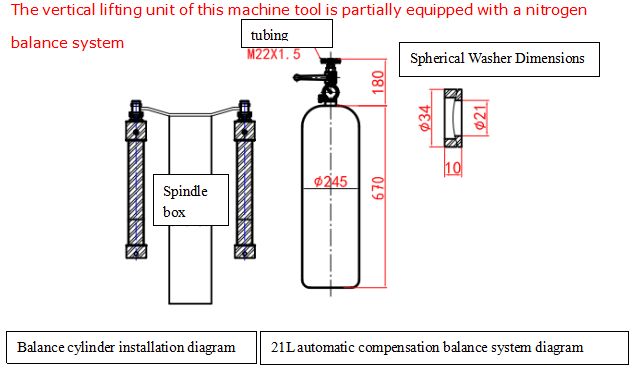
2.2.Id-direzzjoni li tiċċaqlaq tar-ras tal-qawwa tat-tħaffir u t-tħin (inkluż ir-ras tal-qawwa 1 u 2) tadotta struttura tal-muntun kwadra, l-iktar metodu avvanzat tal-ferrovija tal-gwida kkombinata tal-wajer-hard, il-ferrovija iebsa hija mdawra b'appoġġ qawwi, 4 binarji ta 'gwida lineari tar-rombli pari huma ggwidati, u s-sewqan jadotta mutur servo AC Drive iċ-ċinturin sinkroniku (i = 2) u trasmissjoni bil-kamin tal-ballun ta 'preċiżjoni, ir-ras tal-qawwa tadotta l-mutur servo biex jonqos permezz taċ-ċinturin sinkroniku u r-rota sinkronika, iggwidata mill-preċiżjoni heavy-duty par tal-ferrovija ta 'gwida, u jsuq il-kamin tal-ballun vertikali biex idur, jirrealizza r-ras tal-qawwa Do moviment vertikali 'l fuq u' l isfel , u mgħammra b'bar tal-bilanċ tan-nitroġenu biex tnaqqas il-kapaċità tal-ġarr tar-ras tal-magna fuq il-kamin u l-mutur servo. Il-mutur ta 'l-assi Z għandu funzjoni ta' brejk awtomatiku. Fil-każ ta 'nuqqas ta' enerġija, il-brejk awtomatiku se jżomm ix-xaft tal-mutur sewwa. , sabiex ma tistax iddur. Meta taħdem, meta t-drill bit ma tmissx il-biċċa tax-xogħol, se titma malajr; meta t-drill bit tmiss il-biċċa tax-xogħol, awtomatikament jaqleb għall-għalf tax-xogħol. Meta t-drill bit jippenetra l-biċċa tax-xogħol, awtomatikament jaqleb għal rewind veloċi; meta t-tarf tal-drill bit iħalli l-biċċa tax-xogħol u jilħaq il-pożizzjoni stabbilita, il-worktable se timxi għall-pożizzjoni toqba li jmiss biex tirrealizza ċirkolazzjoni awtomatika. Ir-ras tal-qawwa tadotta l-kombinazzjoni ta 'wajer u ferrovija iebsa, li mhux biss tiżgura l-veloċità tat-tħaddim tat-tagħmir, iżda wkoll ittejjeb ħafna r-riġidità tat-tagħmir. U jista 'jirrealizza l-funzjonijiet ta' tħaffir ta 'toqba għomja, tħin, ċanfrin, tkissir ta' ċippa, tneħħija awtomatika ta 'ċippa, eċċ., Li jtejjeb il-produttività tax-xogħol.
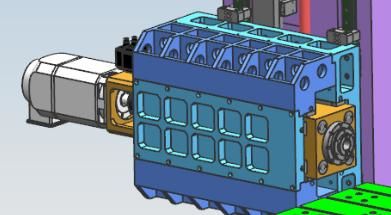
(ras tal-qawwa tax-xellug)
2.3. Tneħħija taċ-ċippa u tkessiħ
Hemm conveyors taċ-ċippa tal-katina spirali u ċatta installati fuq iż-żewġ naħat taħt il-bank tax-xogħol, u ċ-ċipep jistgħu jiġu skarikati awtomatikament lill-conveyor taċ-ċippa fl-aħħar permezz ta 'żewġ stadji ta' spirali u pjanċi tal-katina biex jiġu realizzati produzzjoni ċivilizzata. Hemm pompa tat-tkessiħ fit-tank tal-likwidu li jkessaħ tal-conveyor taċ-ċippa, li tista 'tintuża għat-tkessiħ estern tal-għodda biex tiżgura l-prestazzjoni tat-tħaffir u l-ħajja tas-servizz tat-drill bit, u l-likwidu li jkessaħ jista' jiġi riċiklat.
3.Sistema ta' kontroll numeriku diġitali sħiħ:
3.1.Bil-funzjoni tat-tkissir taċ-ċippa, il-ħin tat-tkissir taċ-ċippa u ċ-ċiklu tat-tkissir taċ-ċippa jistgħu jiġu stabbiliti fuq l-interface bniedem-magna.
3.2.Bil-funzjoni tal-irfigħ tal-għodda, l-għoli tal-irfigħ tal-għodda jista 'jiġi ssettjat fuq l-interface bniedem-magna. Meta t-tħaffir jilħaq dan l-għoli, il-bit drill jittella 'malajr fil-parti ta' fuq tal-biċċa tax-xogħol, u mbagħad iċ-ċipep jintremew, u mbagħad jintbagħtu malajr lejn il-wiċċ tat-tħaffir u awtomatikament konvertiti għax-xogħol.
3.3.Il-kaxxa tal-kontroll tal-operazzjoni ċentralizzata u l-unità li tinżamm fl-idejn jadottaw sistema ta 'kontroll numeriku u huma mgħammra b'interface USB u wiri LCD tal-kristalli likwidi. Sabiex tiffaċilita l-ipprogrammar, il-ħażna, il-wiri u l-komunikazzjoni, l-interface tal-operat għandu funzjonijiet bħal djalogu bejn il-bniedem u l-magna, kumpens ta 'żball u allarm awtomatiku.
3.4.It-tagħmir għandu l-funzjoni li jipprevedi u jispezzjona mill-ġdid il-pożizzjoni tat-toqba qabel l-ipproċessar, u l-operazzjoni hija konvenjenti ħafna.
4. Lubrikazzjoni awtomatika
Pari ta 'linji gwida lineari ta' preċiżjoni ta 'għodda tal-magni, pari ta' kamin tal-ballun ta 'preċiżjoni u pari oħra ta' moviment ta 'preċiżjoni għolja huma mgħammra b'sistemi ta' lubrikazzjoni awtomatiċi. Il-pompa tal-lubrikazzjoni awtomatika toħroġ żejt tal-pressjoni, u l-kamra taż-żejt tal-lubrikazzjoni kwantitattiva tidħol fiż-żejt. Wara li l-kamra taż-żejt tkun mimlija biż-żejt, meta l-pressjoni tas-sistema titla 'għal 1.4-1.75Mpa, is-swiċċ tal-pressjoni fis-sistema jingħalaq, il-pompa tieqaf, u l-valv tal-ħatt jinħatt fl-istess ħin. Meta l-pressjoni taż-żejt fit-triq tinżel taħt 0.2Mpa, il-lubrikanti kwantitattiv jibda jimla l-punt tal-lubrikazzjoni u jlesti mili taż-żejt wieħed. Minħabba l-provvista preċiża taż-żejt tal-injettur kwantitattiv taż-żejt u l-iskoperta tal-pressjoni tas-sistema, il-provvista taż-żejt hija affidabbli, u tiżgura li jkun hemm film taż-żejt fuq il-wiċċ ta 'kull par kinematiku, tnaqqas il-frizzjoni u l-użu, u tevita l-ħsara lill- l-istruttura interna kkawżata minn sħana żejda. , biex tiżgura l-eżattezza u l-ħajja tal-għodda tal-magni. Meta mqabbel mal-par tal-binarji tal-gwida li jiżżerżqu, il-par tal-linji tal-gwida lineari tal-irrumblar użat f'din l-għodda tal-magni għandu serje ta 'vantaġġi:
①Is-sensittività tal-moviment hija għolja, il-koeffiċjent tal-frizzjoni tal-ferrovija tal-gwida tal-irrumblar huwa żgħir, 0.0025 ~ 0.01 biss, u l-qawwa tas-sewqan hija mnaqqsa ħafna, li hija ekwivalenti biss għal 1/10 tal-makkinarju ordinarju.
② Id-differenza bejn il-frizzjoni dinamika u statika hija żgħira ħafna, u l-prestazzjoni ta 'segwitu hija eċċellenti, jiġifieri, l-intervall ta' ħin bejn is-sinjal tas-sewqan u l-azzjoni mekkanika huwa estremament qasir, li jwassal għat-titjib tal-veloċità tar-rispons u s-sensittività ta ' is-sistema ta' kontroll numeriku.
③Huwa adattat għal moviment lineari b'veloċità għolja, u l-veloċità istantanja tagħha hija madwar 10 darbiet ogħla minn dik tal-binarji ta 'gwida li jiżżerżqu.
④ Jista 'jirrealizza moviment mingħajr vojt u jtejjeb ir-riġidità tal-moviment tas-sistema mekkanika.
⑤Prodott minn manifatturi professjonali, għandu preċiżjoni għolja, versatilità tajba u manutenzjoni faċli.
5. Ambjent tal-użu tal-magni:
Provvista ta 'enerġija: AC380V bi tliet fażijiet ± 10%, 50Hz ± 1 Temperatura ambjentali: 0 ° ~ 45 °
Ħamsa, il-parametri tekniċi ewlenin:
| mudell | BOSM4014 | |
| Daqs massimu tal-biċċa tax-xogħol tal-ipproċessar | Tul × wisa × għoli (mm) 4000 × 1600 × 1000 | |
| Għalf massimu tal-gantry | Wisa' (mm) | 2300 |
| daqs tal-mejda tax-xogħol | Tul X Wisa' (mm) | 4000 * 1400 |
|
Kap tat-tħaffir tat-tip tal-muntun orizzontali qawwa ras wieħed tnejn
| Kwantità (2) | 2 |
| Taper tal-magħżel | BT50 | |
| Dijametru tat-tħaffir (mm) | Φ2-Φ60 | |
| Dijametru tat-tapping (mm) | M3-M30 | |
| Dijametru tad-diska tat-tħin (mm) | 300 | |
| Veloċità tal-magħżel (r/min) | 30 ~ 6000 | |
| Qawwa tal-mutur servo taż-żarżur (kw) | 37 | |
| Distanza tal-imnieħer tal-magħżel miċ-ċentru tal-mejda (mm) | 650-1150 | |
| Skeda tax-xellug u tal-lemin ta' muntun wieħed (mm) | 500 | |
| Id-distanza bejn iċ-ċentru tal-muntun u l-pjan tal-mejda (mm) | 200-1400 | |
| Il-fuq u l-isfel tal-muntun (mm) | 1200 | |
| Ripetibbiltà | 300mm * 300mm | ±0.02 |
| Dimensjonijiet tal-Għodda tal-Magni | Tul × wisa × għoli (mm) | skond tpinġijiet |
| Piż gross (t) | (madwar) 36 | |
Il-parametri ta 'hawn fuq huma parametri preliminari tad-disinn. Fid-disinn attwali, jista 'jkun hemm bidliet skont ir-rekwiżiti tal-ipproċessar tal-biċċa tax-xogħol u r-rekwiżiti tad-disinn tal-għodda tal-magni, sabiex jissodisfaw ir-rekwiżiti tal-partijiet tal-ipproċessar tal-kumpanija tiegħek.